ROS智能导航作业机器人
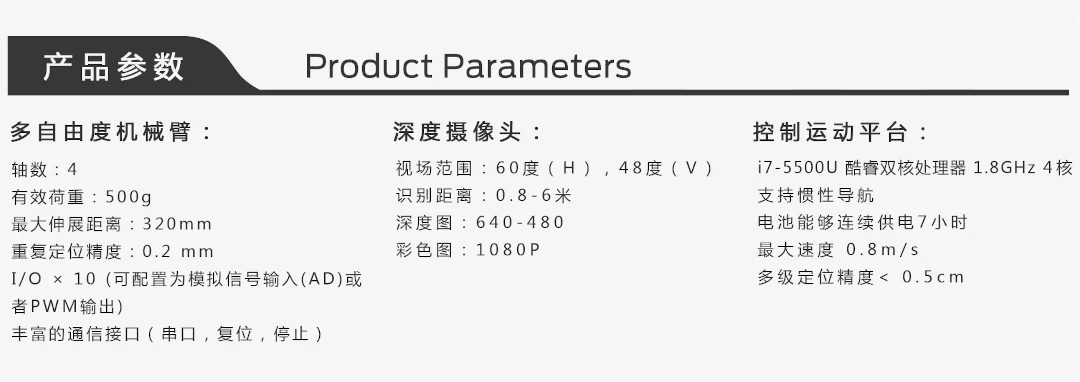
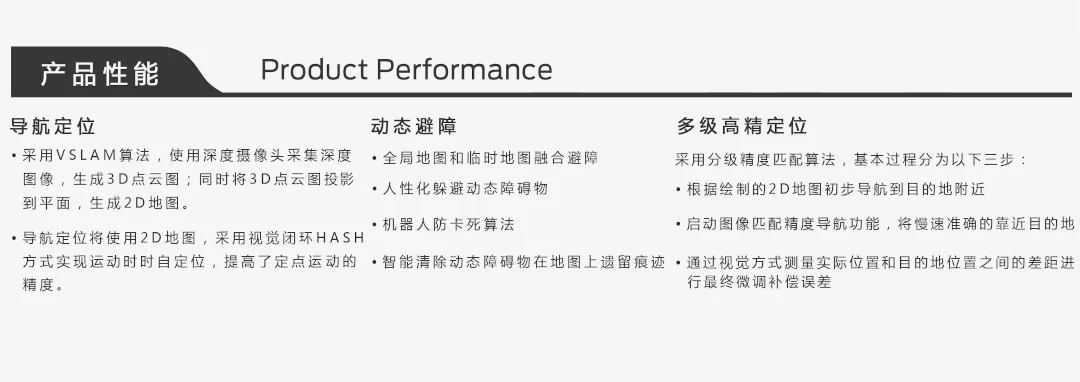
本产品是一款专业的 VSLAM(Visual Simultaneous Localization and Mapping,基于视觉的即时定位与地图构建)智能作业机器人,搭载带有深度信息的双目摄像头,可实现在室内环境下进行地图构建、路径规划、自主导航、智能避障等功能,配合多自由度机械臂可实现对目标的吸附、抓取、摆放等操作。
针对智能制造场景的需求,本机器人产品实现了一个微型的自动化作业闭环系统,可实现从生产平台取件(成品件)、到储物架放件、以及从原材料架取件(原料件)并上料到生产平台的完整闭环操作,被广泛应用于科研、教学等领域。用户可在此基础上很容易扩展更多功能,以应对更多更复杂的智能化生产加工场景需求。